Ученые разработали новый подход к автономному исследованию пространства мобильными роботами. Метод сочетает оптимизацию карты в реальном времени с улучшенной оценкой границ исследуемой области. В сравнительных тестах технология продемонстрировала впечатляющее повышение эффективности – от 10% до 30% по сравнению с классическими методами.
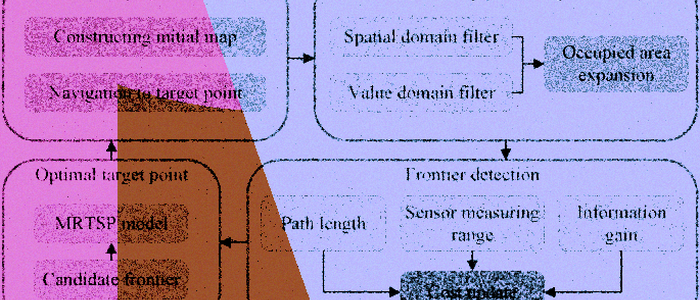
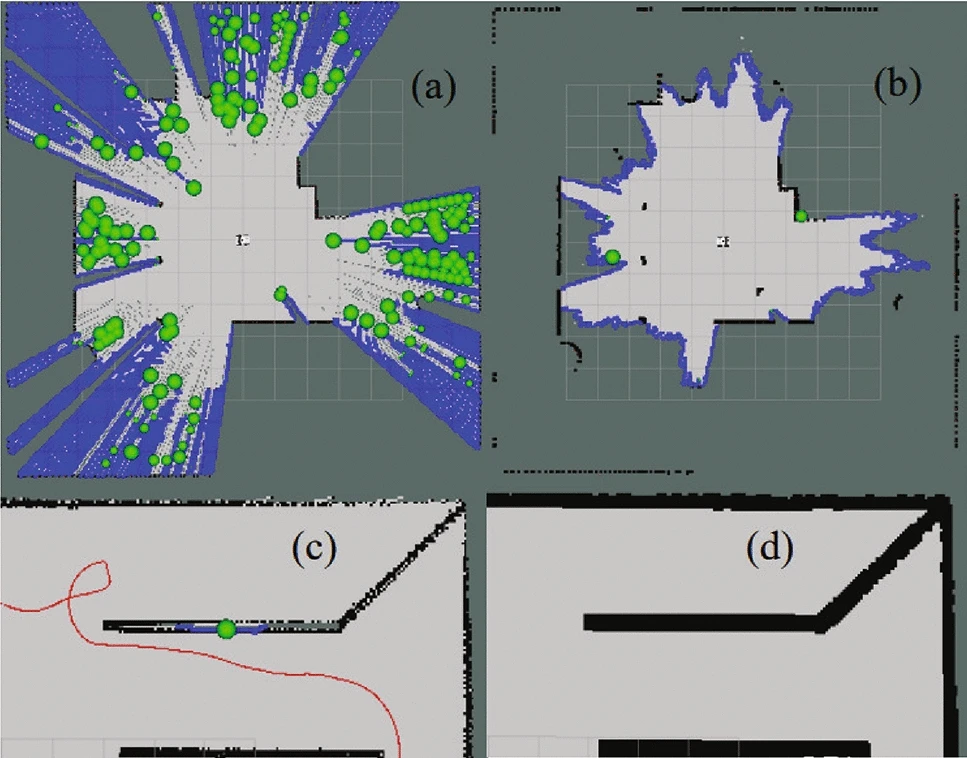
Ключевое улучшение достигается за счет применения билатеральной фильтрации при построении карты, что позволяет значительно сократить количество ложных границ. Это особенно важно при работе с лидаром, когда на больших расстояниях лазерные лучи становятся более разреженными. В реальных тестах новый метод сократил время исследования пространства на 23.82%, а длину пройденного пути – на 16.13%.
Исследователи протестировали технологию в трех различных сценариях: коридор, лабиринт и загроможденное пространство. В сложном лабиринтном окружении метод сократил длину пути на 12.99% и время исследования на 9.31%. В коридорном сценарии результаты оказались еще лучше – сокращение длины пути на 27% и времени исследования на 19.69%.
Тесты проводились на четырехколесном роботе, оснащенном 16-линейным лидаром и процессором Nvidia Jetson TX2. Разработка может найти применение в различных сферах – от поисково-спасательных операций до автономной инспекции промышленных объектов.
Источник новости и обложки: www.nature.com