
Знакомство с ROS2. Часть 2. Ключевые концепции: пакеты, рабочие пространства, наложение
Знакомство с ROS2. Часть 1. Установка на Raspberry Pi
Знакомство с ROS2. Часть 2. Ключевые концепции: нода, топик, издатель, подписчик, сервисы и действия
Знакомство с ROS2. Практикум: cоздаем систему издатель-подписчик
Знакомство с ROS2. Практикум: Управляем двигателем с помощью Raspberry Pi

Знакомство с ROS2. Часть 1. Установка на Windows и Ubuntu

ИИ-агенты для начинающих. Часть 4. Агенты в CrewAI

ИИ-агенты для начинающих. Практикум: создание ИИ-системы перевода, фактчекинга и редактирования текстов в CrewAI
ИИ-агенты для начинающих. Часть 2. Агентный фреймворк CrewAI

ИИ-агенты для начинающих. Часть 1. Что такое ИИ-агенты и где они применяются

Лучшие практики работы с моделями рассуждений: 7 правил написания промтов
ИИ-агенты для начинающих. Часть 5. Создание задач для агентов в CrewAI
ИИ-агенты для начинающих. Часть 3. Установка CrewAI и создание нового проекта

9 степеней свободы: подключение MPU-9265 к Raspberry Pi
Мониторинг интернет-соединения на Raspberry Pi: Python-скрипт для автоматических уведомлений по почте
Подключение GPS NEO-8M к Raspberry Pi

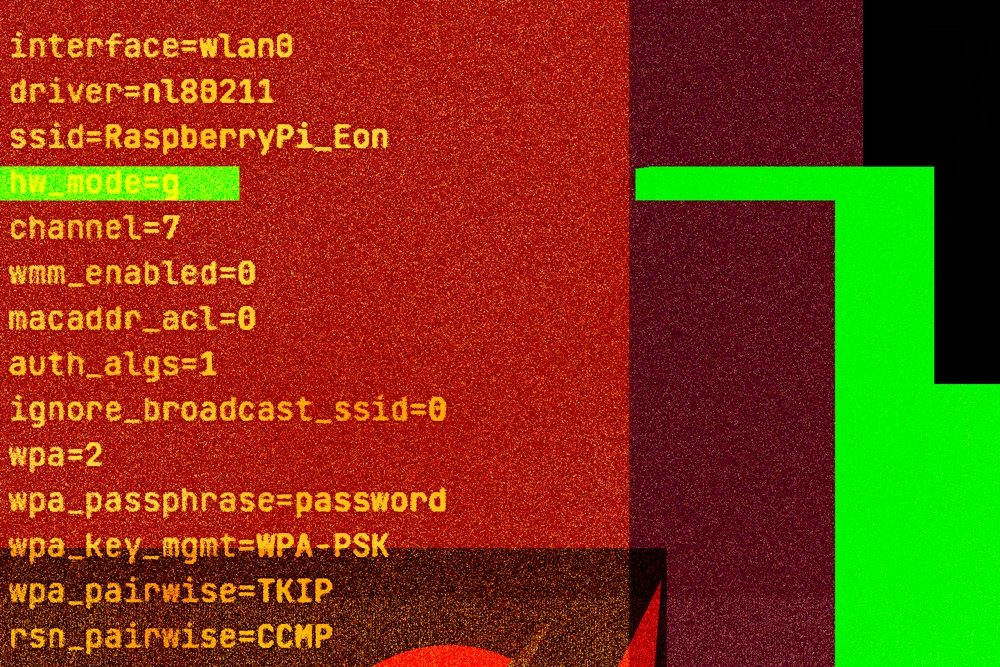
Как передать сообщение азбукой Морзе по Wi-Fi с Raspberry Pi на NodeMCU (ESP8266)

Транскрибация русской и английской речи с помощью Whisper и Python
Rathole: подключение Raspberry Pi к Windows через удаленный сервер
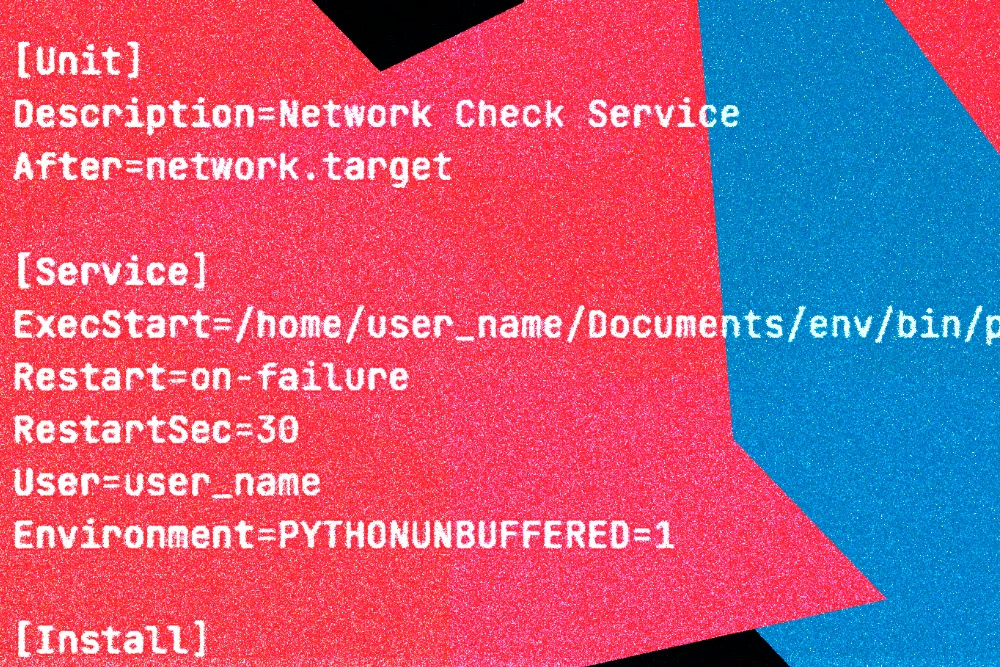
Автозапуск Python-скриптов на Linux: настройка systemd

Как подключить и настроить микрофон SPH0645 на Raspberry Pi

Экологичный ИИ: обучаем нейросеть классифицировать мусор